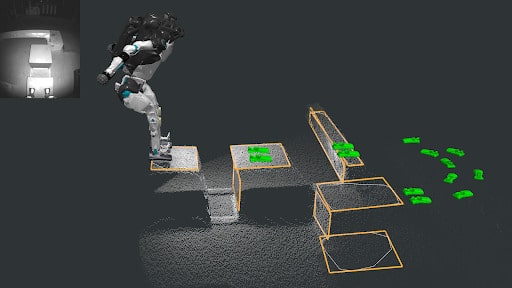
Robot nhìn thấy thế giới thực qua bằng cách thu thập dữ liệu (survey) từ nhiều loại cảm biến như camera RGB, LiDar, camera hồng ngoại, radar… sau đó xử lý các dữ liệu này qua công nghệ “Thị Giác Máy Tính” (Computer Vision) và kết hợp AI để tạo ra mô hình 3D hoặc […]